�gӭ��(l��i)�����d�_(d��)�W(w��ng)վ

ȫ��(gu��)����(w��)�ᾀ��
����(w��)�W(w��ng)�c(di��n)�� ��ɽ�Ϻ���ɽ���TȪ�������L(zh��ng)ɳ���(y��ng)�Ͳ��F�(y��ng)�ĕ�(hu��)�_ƽ
����(w��)�W(w��ng)�c(di��n)�� ��ɽ�Ϻ���ɽ���TȪ�������L(zh��ng)ɳ���(y��ng)�Ͳ��F�(y��ng)�ĕ�(hu��)�_ƽ
ȫ��(gu��)����(w��)�ᾀ�����L(zh��ng);�M(f��i)��
�����Ԓ0757-88357760
��ԃ�ᾀ13929907955
�V��˾�ͷ���
�Ϻ��ֹ�˾�ͷ���
��˾���g(sh��)���ͷ���
�����ŷ����ڶ�λ���ƣ����҂�ƽ�r(sh��)����A5�ŷ��(q��)��(d��ng)���S���Ĺ����У�����ׂ�(g��)����(sh��)��Ҫ��Ϥ�������O(sh��)�÷�����
����(sh��)�O(sh��)��
�ŷ����D(zhu��n)�����ГQ���������@�ӵ����Σ��ŷ��(q��)��(d��ng)��Ҫ�{(di��o)�Q���D(zhu��n)����ֻ��Ҫ��Pr0.00�е�ֵ�ɡ�1���Ğ顰0�������ɡ�0���Ğ顰1�������Sֵ�ǡ�1������
�ŷ�����ģʽ���O(sh��)�á�λ�ÿ�����ȱʡģʽ��Pr0.01=0��������ģʽ�O(sh��)�ÿɅ������£�

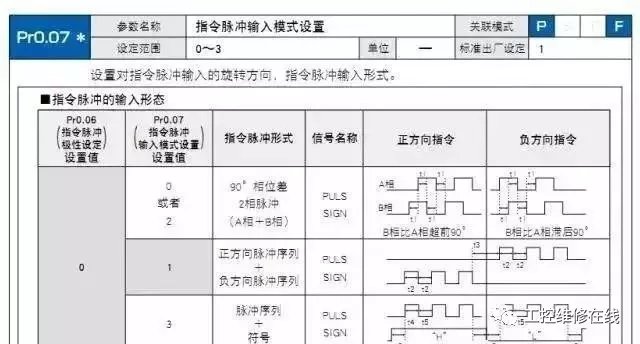
�ŷ������}�_ݔ�뷽ʽ��PLC�l(f��)�����}�_�o�ŷ��(q��)��(d��ng)�����ЎN��ʽ�����������D(zhu��n)һ·�}�_�����D(zhu��n)һ·�}�_��Ҳ������ֻ��һ·�}�_��������һ��(g��)���������̖(h��o)���ߵ��ƽ���ɣ�����(d��ng)ȻҲ������90����λ���2���}�_��Pr0.07�քe�O(sh��)�顰1������3������0����2�������Կ��������O(sh��)�Þ顰3��ֻ��һ·�}�_�ͿɌ�(sh��)�F(xi��n)��λ���ƣ��������߶���Ҫ��·�}�_����(du��)��һ��(g��)�S���ƣ���һ���ŷ�ϵ�y(t��ng)������PLC���]�І�(w��n)�}������ǃɂ�(g��)�S���ƣ��t��회�Pr0.07�O(sh��)�Þ顰3����ȱʡֵ�顰1������˴˅���(sh��)һ�㶼��Ҫ�O(sh��)�á���(d��ng)Ȼ�˅���(sh��)�cPr0.06����O(sh��)�ã����x��ݔ����}�_�O�ԡ�
늙C(j��)ÿ���D(zhu��n)һȦ����Ҫ��ָ���}�_���˅���(sh��)�漰��PLC���̕r(sh��)����λ���x�ľ��_���ƣ�Ҳ����PLC�l(f��)���ق�(g��)�}�_���ŷ�늙C(j��)�D(zhu��n)һȦ��늙C(j��)����(d��ng)�z�U���D(zhu��n)���z�U���ݾ���O(sh��)��5mm���tPLCÿ�l(f��)Pr0.08���O(sh��)�õĔ�(sh��)ֵ���}�_��ȱʡ��10000�����z�U����(d��ng)�\(y��n)��(d��ng)ƽ�_(t��i)���Ƅ�(d��ng)5mm������(sh��)Pr0.09��Pr0.10�Ɍ�(sh��)�F(xi��n)ͬ�ӵĹ��ܣ��m����PLC�}�_��(sh��)���Ƅ�(d��ng)���x���������Ĉ�(ch��ng)�ϣ��䌍(sh��)������Pr0.08���ѽ�(j��ng)�o(w��)���������ˡ�
�ŷ���λ��һ��ɶ��b�ИO��λ���г��_�P(gu��n)������b�ˣ���Ҫ�O(sh��)��Pr5.04�ɡ�1���O(sh��)�Þ顰0������t�г��_�P(gu��n)���������á��������Ҫ�O��λ�_�P(gu��n)���t�o(w��)�迼�]�˅���(sh��)��
����(sh��)�O(sh��)�÷�����

��������(sh��)һ�[��

�����ŷ��(q��)��(d��ng)��һֱ�����´��Įa(ch��n)Ʒ���ڱ���͑��п���(hu��)���@���ǘӵĆ�(w��n)�}���F(xi��n)������͞���������10��(g��)��Ҋ��(w��n)�}����Q�k�����^��(du��)ֵ���ղأ�
1.����(sh��)��ʽ�����ŷ�ϵ�y(t��ng)MHMA2KW��ԇ�C(j��)�r(sh��)һ��늣�늙C(j��)�����(d��ng)���кܴ������Ȼ���(q��)��(d��ng)�����F(xi��n)16̖(h��o)��(b��o)����ԓ��ô��Q��
�@�N�F(xi��n)��һ���������(q��)��(d��ng)���������O(sh��)���^(gu��)�ߣ��a(ch��n)�����Լ���ʎ��Ո(q��ng)�{(di��o)������(sh��)No.10��No.11��No.12���m��(d��ng)����ϵ�y(t��ng)���档(Ո(q��ng)������ʹ���f(shu��)���������P(gu��n)�������{(di��o)���ă�(n��i)��)��
2.���½����ŷ��(q��)��(d��ng)����늾ͳ��F(xi��n)22̖(h��o)��(b��o)������ʲô��
22̖(h��o)��(b��o)���Ǿ��a�����ψ�(b��o)�����a(ch��n)����ԭ��һ���У�
A.���a���Ӿ��І�(w��n)�}���ྀ����·�����e(cu��)�ȵȣ�Ո(q��ng)�м�(x��)�錦(du��)��
B.늙C(j��)�ϵľ��a���І�(w��n)�}���e(cu��)λ���p�ĵȣ�Ո(q��ng)���ޡ�
3.�����ŷ�늙C(j��)�ںܵ͵��ٶ��\(y��n)�Еr(sh��)���r(sh��)��r(sh��)����������һ�ӣ���ô�k��
�ŷ�늙C(j��)���F(xi��n)�������ЬF(xi��n)��һ��������ϵ�y(t��ng)����̫������ģ�Ո(q��ng)�{(di��o)������(sh��)No.10��No.11��No.12���m��(d��ng)�{(di��o)��ϵ�y(t��ng)���棬���\(y��n)���(q��)��(d��ng)���Ԅ�(d��ng)�����{(di��o)�����ܡ�(Ո(q��ng)������ʹ���f(shu��)���������P(gu��n)�������{(di��o)���ă�(n��i)��)
4.���½����ŷ�ϵ�y(t��ng)��λ�ÿ��Ʒ�ʽ�£�����ϵ�y(t��ng)ݔ�������}�_�ͷ�����̖(h��o)�������������D(zhu��n)ָ��߀�Ƿ��D(zhu��n)ָ�늙C(j��)ֻ��һ��(g��)�����D(zhu��n)����ʲô��
���½����ŷ�ϵ�y(t��ng)��λ�ÿ��Ʒ�ʽ�£����Խ������N������̖(h��o)���}�_/������/���}�_��A/B�����}�_���(q��)��(d��ng)���ij��S�O(sh��)�Þ�A/B�����}�_(No42��0)��Ո(q��ng)��No42�Ğ�3(�}�_/������̖(h��o))��
5.���½����ŷ�ϵ�y(t��ng)��ʹ���У��ܷ����ŷ�-ON�������늙C(j��)Ó�C(j��)����̖(h��o)���Ա�ֱ���D(zhu��n)��(d��ng)늙C(j��)�S��
�M����SRV-ON��̖(h��o)���_�r(sh��)늙C(j��)�܉�Ó�C(j��)(̎�����ɠ�B(t��i))������Ҫ������(l��i)����(d��ng)��ֹͣ늙C(j��)���l��ʹ�����_�P(gu��n)늙C(j��)���ܕ�(hu��)�p���(q��)��(d��ng)���������Ҫ��(sh��)�F(xi��n)Ó�C(j��)���ܕr(sh��)�����Բ��ÿ��Ʒ�ʽ���ГQ��(l��i)��(sh��)�F(xi��n)�����O(sh��)�ŷ�ϵ�y(t��ng)��Ҫλ�ÿ��ƣ����Ԍ����Ʒ�ʽ�x��(sh��)No02�O(sh��)�Þ�4������һ��ʽ��λ�ÿ��ƣ��ڶ���ʽ���D(zhu��n)�ؿ��ơ�Ȼ����C-MODE��(l��i)�ГQ���Ʒ�ʽ�����M(j��n)��λ�ÿ��ƕr(sh��)��ʹ��̖(h��o)C-MODE���_��ʹ�(q��)��(d��ng)�������ڵ�һ��ʽ(��λ�ÿ���)�£�����ҪÓ�C(j��)�r(sh��)��ʹ��̖(h��o)C-MODE�]�ϣ�ʹ�(q��)��(d��ng)�������ڵڶ���ʽ(���D(zhu��n)�ؿ���)�£������D(zhu��n)��ָ��ݔ��TRQRδ�Ӿ������늙C(j��)ݔ���D(zhu��n)�؞��㣬�Ķ���(sh��)�F(xi��n)Ó�C(j��)��
6.���҂��_�l(f��)�Ĕ�(sh��)��㊴���ʹ�õ����½����ŷ�������ģ�M���Ʒ�ʽ�£�λ����̖(h��o)���(q��)��(d��ng)�����}�_ݔ��������Ӌ(j��)��C(j��)̎�������b�C(j��)���{(di��o)ԇ�r(sh��)���l(f��)���\(y��n)��(d��ng)ָ�늙C(j��)���w܇��ʲôԭ��
�@�N�F(xi��n)���������(q��)��(d��ng)���}�_ݔ��������Ӌ(j��)��C(j��)��A/B������̖(h��o)�����e(cu��)�`���γ�����������ɣ����Բ������·���̎����
A.�IJɘӳ�����㷨��
B.���(q��)��(d��ng)���}�_ݔ����̖(h��o)��A+��A-(����B+��B-)��(du��)�{(di��o)���Ը�׃����
C.���(q��)��(d��ng)������(sh��)No45����׃���}�_ݔ����̖(h��o)������
7.���҂����Ƶ�һ�_(t��i)�z�y(c��)�O(sh��)���У��l(f��)�F(xi��n)���½����ŷ�ϵ�y(t��ng)��(du��)�҂��ęz�y(c��)�b����һЩ�ɔ_��һ�㑪(y��ng)��ȡʲô������(l��i)������
���ڽ����ŷ��(q��)��(d��ng)����������׃��ԭ�����������ڿ��ơ��z�y(c��)ϵ�y(t��ng)����һ��(g��)�^��ͻ���ĸɔ_Դ�����˜p���������ŷ��(q��)��(d��ng)����(du��)��������O(sh��)��ĸɔ_��һ����Բ��������k����
A.�(q��)��(d��ng)����늙C(j��)�Ľӵضˑ�(y��ng)�ɿ��ؽӵأ�
B.�(q��)��(d��ng)�����Դݔ��˼Ӹ��x׃�����͞V������
C.���п�����̖(h��o)�͙z�y(c��)��̖(h��o)��ʹ�����ξ���
�ɔ_��(w��n)�}����Ӽ��g(sh��)����һ��(g��)�ܼ��ֵ��y�}���]�й̶��ķ���������ȫ��Ч���ų�����ͨ���{��(j��ng)�(y��n)��ԇ�(y��n)��(l��i)���ҿ��ɔ_�Ĵ�ʩ��
8.�ŷ�늙C(j��)��ʲô����(hu��)�G����
�ŷ�늙C(j��)�(q��)��(d��ng)������늙C(j��)���a���ķ�����̖(h��o)������ָ���}�_�M(j��n)�б��^���Ķ���(g��u)����һ��(g��)λ�õİ��]�h(hu��n)���ơ������ŷ�늙C(j��)����(hu��)���F(xi��n)�G���F(xi��n)��ÿһ��(g��)ָ���}�_�����Եõ��ɿ�푑�(y��ng)��
9.��ο��]�����ŷ��Ĺ���Դ��(w��n)�}��
Ŀǰ���������ձ��a(ch��n)�����ŷ�늙C(j��)��������200V��늣���(gu��)��(n��i)�Դ��(bi��o)��(zh��n)��ͬ�����Ա�횰����·�����Q��
A.��(du��)��750W���µĽ����ŷ���һ����r�¿�ֱ�ӌ�����220V�����(q��)��(d��ng)����L1��L3���ӣ�
B.��(du��)��������̖(h��o)늙C(j��)�����hʹ������׃����������380V׃?y��u)����?00V�������(q��)��(d��ng)����L1��L2��L3��
10.��(du��)�ŷ�늙C(j��)�M(j��n)�ЙC(j��)е���b�r(sh��)����(y��ng)�eע��ʲô��
����ÿ�_(t��i)�ŷ�늙C(j��)��˲������b�����D(zhu��n)���a��������һ��(g��)ʮ������ľ��ܹ�W(xu��)�������^(gu��)��ě_�����϶���(hu��)ʹ��p�ġ�
�����ŷ�����(b��o)��14���a���ϾS����һ�(y��)��׃�l���S��֮����z�y(c��)ǰ���·���σ���
��һ�(y��)�������ŷ���A300���ϾS��
׃�l���S�� ����׃�l�� ����׃�l��V1000 ����׃�l�� ����׃�l��
��ɽ�����d�_(d��)�Ԅ�(d��ng)���Ƽ�����˾ ȫ��(gu��)����(w��)�ᾀ��400-678-6333 ���Ї�(gu��)��ֵ����ه���Ԅ�(d��ng)������(w��)��
��ɽ����˾��ַ����ɽ�жU�Dž^(q��)�p����·16̖(h��o)�Ծ�8̖(h��o)��7������(c��)
�Ϻ��ֹ�˾��ַ���Ϻ��ɽ��^(q��)���ɹ�·2751̖(h��o)��������1007-1008��
���d�_(d��)�Ԅ�(d��ng)�����(qu��n)���� ©2011-2012 ��ICP��2023152307̖(h��o)-1
(li��n)ϵվ�L(zh��ng)��QQ1379696822
���M(j��n)�뿴�D�u(p��ng)Փ")